Long term visual SLAM faces a number of challenges because of environmental changes over time that are caused by objects that move (furniture, equipment), changes in appearance (open drapes, repaint wall), and apparent changes (lighting, seasonal). We would like to investigate map representations that support collections of map features that may vary over time, efficiently store and index, support efficient loop closure and re-localization, and allow for runing. We would also like to investigate approaches to feature/keyframe management to determine if new representation replaces or augments a previous one, when to merge a new map section, and when to prune an old representation.
An example of tracking and mapping using ORBSLAM2 and ORBSLAM3
Long term mapping for SLAM in dynamic environment
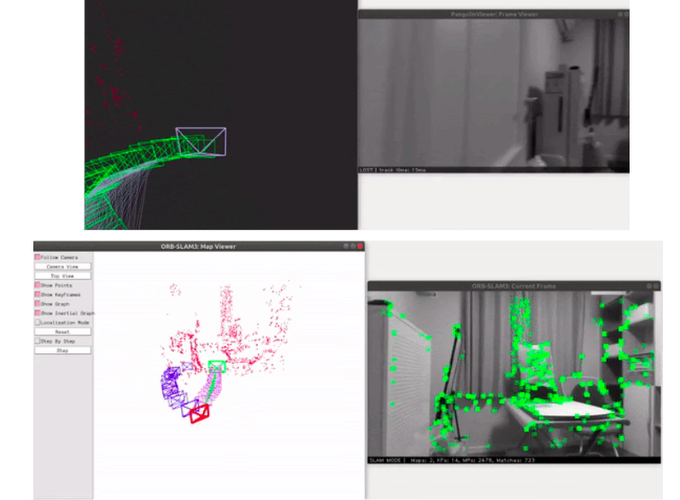 An example of tracking and mapping using ORBSLAM2 and ORBSLAM3
An example of tracking and mapping using ORBSLAM2 and ORBSLAM3